أسطول من القوارب ذاتية القيادة في أمستردام
مُلخص
امتد السباق لإنتاج السيارات ذاتية القيادة إلى الكراسي المتحركة والدراجات النارية وحتى عربات الجولف. ووصلت إلى السفن والقوارب المُستخدمة في توصيل السلع والخدمات وجمع النفايات عبر المجاري المائية للمدن. ويعمل باحثون في معهد ماساتشوستس للتكنولوجيا على تطوير أول أسطول من القوارب ذاتية القيادة في العاصمة الهولندية أمستردام.
الحل المُبتكر
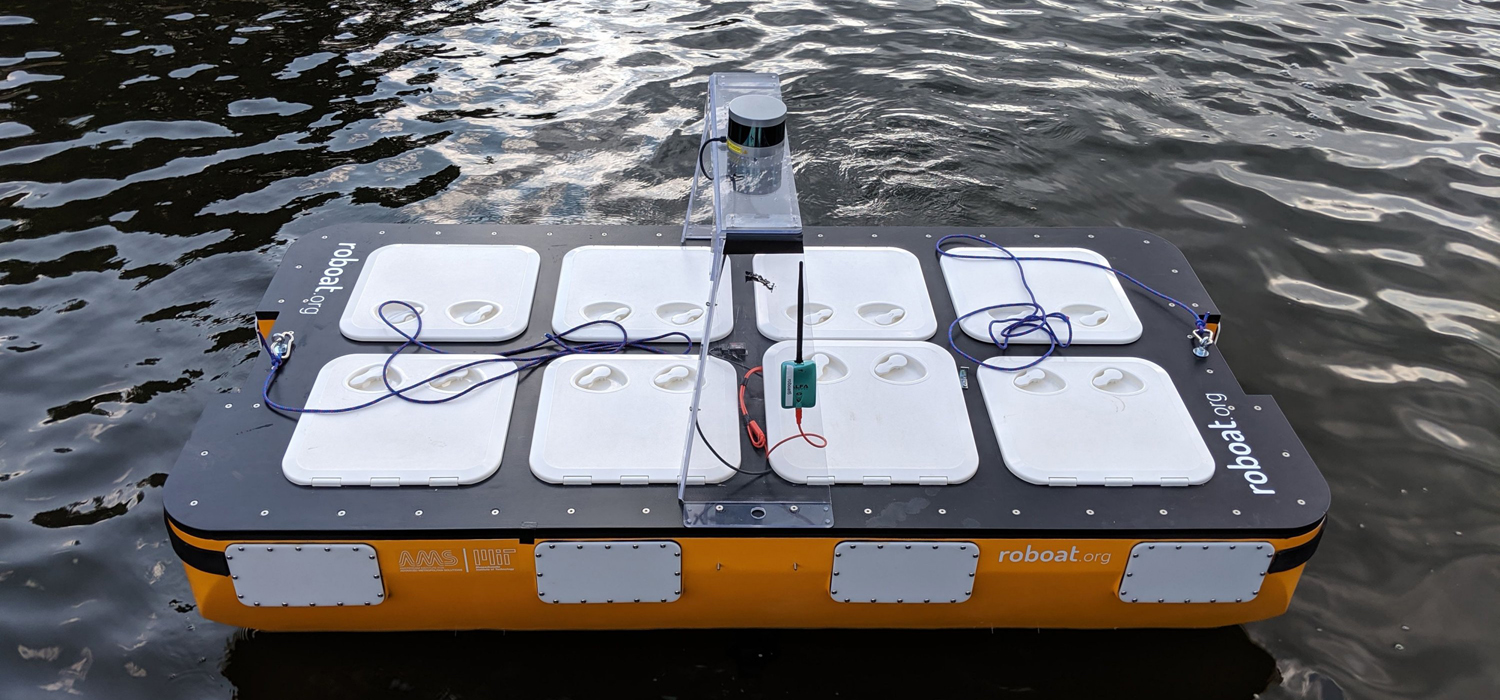
في تحديث لمشروع مدته خمس سنوات من مختبر علوم الحاسب والذكاء الاصطناعي التابع لمعهد ماساتشوستس للتكنولوجيا و"مختبر سينسيبل سيتي" (Senseable City Lab)، بدأ الباحثون في تطوير أول أسطول من القوارب ذاتية القيادة في العاصمة الهولندية أمستردام، وأضافوا قاربًا جديدًا أكبر حجمًا إلى المجموعة ويُطلق عليها اسم "روبوت 2" (Roboat II) بطول نحو مترين ومُخصص لنقل الركاب، ويجمع الاسم بين كلمتيّ روبوت وقارب.
وبالتعاون مع معهد أمستردام لحلول المدن المُتقدمة، طوَّر الفريق خوارزميات للملاحة والتحكم لتحديث التواصل والتعاون بين القوارب. وقالت الأستاذة دانيلا راس مديرة مختبر علوم الحاسب والذكاء الاصطناعي وأحد مؤلفي ورقة بحثية جديدة حول القارب الجديد: "يُبحر القارب روبوت 2 بحرية وبشكلٍ مُستقل باستخدام خوارزميات مُماثلة لتلك المستخدمة في السيارات ذاتية القيادة، ولكنها تتكيف مع القيادة في الماء الآن". وأضافت: "نقوم بتطوير أساطيل من القوارب القادرة على نقل الركاب والبضائع، مع إمكانية التواصل مع الروبوتات الأخرى لتشكيل مجموعة منصات مستقلة لتمكين الأنشطة المائية".
خطوة تجاه قوارب ذاتية القيادة
على مدار سنوات، تمكنت القوارب ذاتية القيادة من نقل البضائع صغيرة الحجم، ولكن بدت إضافة الركاب أمرًا غامضًا بسبب الحجم الحالي للقوارب. ويجري حاليًا تصنيع الدفعة الثالثة من القوارب ذاتية القيادة في أمستردام، ويبلغ طولها 4 أمتار ويمكنها حمل ما بين أربعة إلى ستة ركاب.
وبفضل الخوارزميات القوية، استطاع "روبوت 2" التنقل بشكلٍ مُستقل في قنوات أمستردام لمدة ثلاث ساعات لجمع البيانات، ثم عاد إلى نقطة البداية بهامش خطأ لا يتجاوز 0.17 متر. وقال وي وانج، حد المشاركين في بحث حول القارب "روبوت 2"، أن تطوير نظام قارب ذاتي القيادة قادر على رسم خرائط دقيقة والتحكم ونقل الركاب يُعتبر خطوةً حاسمة نحو تنفيذ النظام بشكل كامل. وأعرب عن أمله في تنفيذ هذه التقنية في قوارب أخرى لجعلها ذاتية القيادة.
في عام 2016، اختبر الباحثون في معهد ماساتشوستس للتكنولوجيا نموذجًا أوليًا بإمكانه التحرك إلى الأمام وإلى الخلف وإلى جانب مسار مُحدد سلفًا في القنوات المائية. وبعد ثلاثة سنوات، تم تحديث الروبوتات من خلال الفصل وإعادة التجميع بشكل مستقل في مجموعة متنوعة من التكوينات.
والآن بدأ "روبوت 2" تجربة مهام النقل بالاستعانة بالأبحاث المحدثة. ويتضمن ذلك خوارزمية جديدة للتموضع والخرائط المتزامنة ووحدة تحكم قائمة على النموذج وتسمى وحدة تحكم تنبؤية نموذجية غير خطية.
أسطول من القوارب ذاتية القيادة
غالبًا ما يكون التواصل بين الروبوتات غير مُستقر أو مُتأخر، مما يُؤدي إلى ضعف التنسيق بين الروبوتات. وتتطلب العديد من خوارزميات التحكم الخاصة بالنقل الجماعي التواصل المباشر والمسافات القريبة بين عناصر المجموعة وتحديد وجهة المهمة، ولكن خوارزمية الفريق الجديدة تحتاج ببساطة إلى روبوت واحد للتعرف على المسار والاتجاه المطلوبين.
وعندما يبدأ القارب القائد في الحركة إلى الوجهة المقصودة، تقوم القوارب الأخرى ذاتية القيادة بتقدير وجهته ومحاذاة تحركاته. وبمقدور القارب القائد تعديل مدخلات أي من القوارب التابعة بدون اتصال بين أي من الروبوتات التابعة وبعضها.
وفي المستقبل، يسعى الفريق إلى استخدام تعلم الآلة لتقدير المؤشرات الرئيسية للقارب ذاتي القيادة عبر الإنترنت. كما يستهدف الفريق استكشاف وحدات التحكم المتكيفة والتي تسمح بالتغير الديناميكي في البنية عند وضع الأجسام على المركب.
ويتخذ "النقل الجماعي" مسارًا مختلفًا لإتمام العديد من المهام. ويقوم النظام باستخدام أداة مراقبة موزعة تضم مجموعة من أجهزة الاستشعار والحواسيب الموزعة المرتبطة بها من خلال نظام، وتحكمها استراتيجية مستوحاة من كيفية سير العمل داخل مستعمرة النمل في نقل الغذاء بدون اتصال. وعلى وجه التحديد، ليس هناك اتصال مباشر بين الروبوتات المتصلة، وهناك قائد واحد يعرف الوجهة ويبدأ في التحرك إلى الوجهة، وتستطيع الروبوتات الأخرى تخمين وجهته ومحاذاة تحركاته وفقًا لذلك.
وقال كارلو راتي مدير "مختبر سينسبل سيتي" أن الخوارزميات التعاونية الحالية نادرًا ما تعاملت مع النظم الديناميكية في الماء. ويفرض النقل الجماعي، باستخدام المركبات المائية، تحديات جديدة لا تواجهها المركبات البرية أو الجوية.
 في مؤسستك؟
في مؤسستك؟